Provides a framework for implementing blocking locks and related synchronizers (semaphores, events, etc) that rely on first-in-first-out (FIFO) wait queues. This class is designed to be a useful basis for most kinds of synchronizers that rely on a single atomic int value to represent state. Subclasses must define the protected methods that change this state, and which define what that state means in terms of this object being acquired or released. Given these, the other methods in this class carry out all queuing and blocking mechanics. Subclasses can maintain other state fields, but only the atomically updated int value manipulated using methods getState, setState and compareAndSetState is tracked with respect to synchronization.
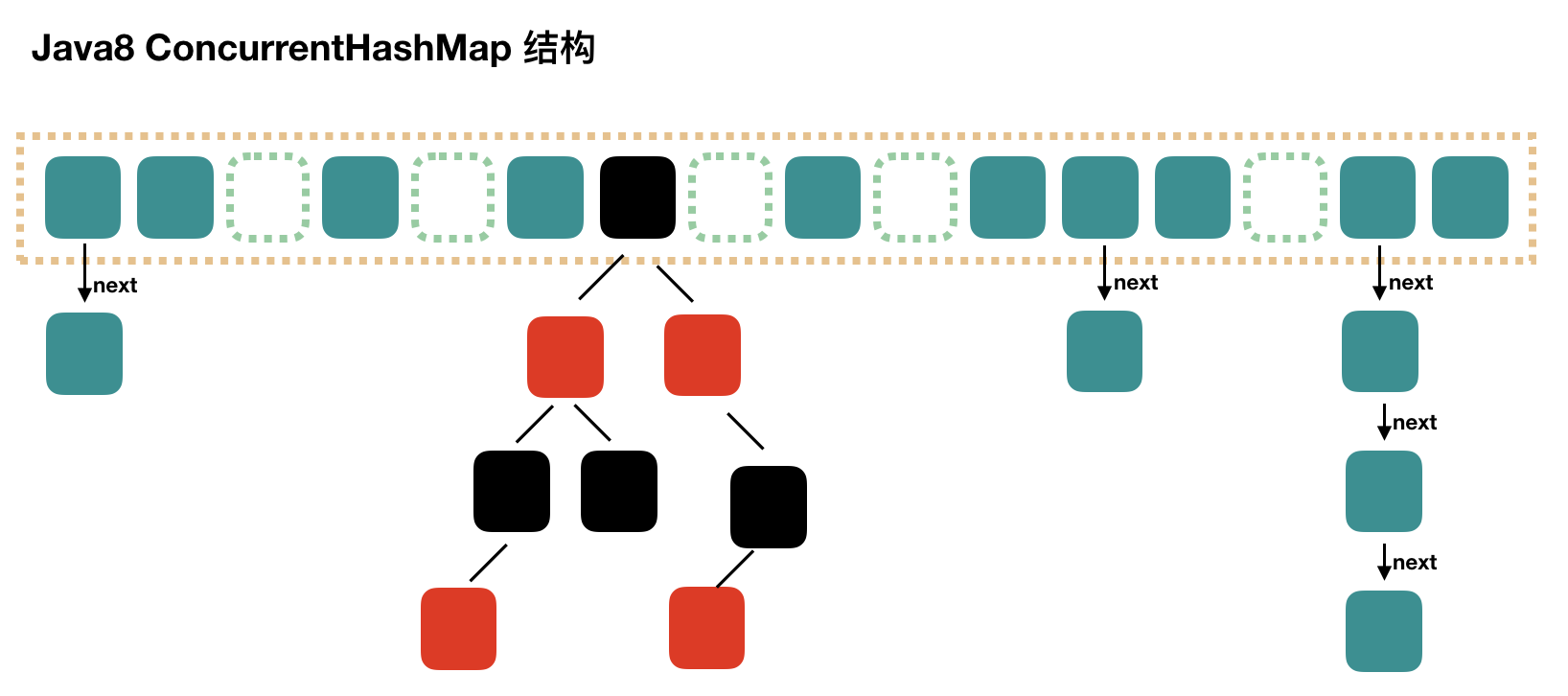
AQS中 维护了一个volatile int state(代表共享资源)和一个FIFO线程等待队列(多线程争用资源被阻塞时会进入此队列)。
/** * Creates and enqueues node for current thread and given mode. * * @param mode Node.EXCLUSIVE for exclusive, Node.SHARED for shared * @return the new node */ // 此方法的作用是把线程包装成node,同时进入到队列中 // 参数mode此时是Node.EXCLUSIVE,代表独占模式 private Node addWaiter(Node mode) { Nodenode=newNode(Thread.currentThread(), mode); // Try the fast path of enq; backup to full enq on failure // 以下几行代码想把当前node加到链表的最后面去,也就是进到阻塞队列的最后 Nodepred= tail;
/** * Checks and updates status for a node that failed to acquire. * Returns true if thread should block. This is the main signal * control in all acquire loops. Requires that pred == node.prev * * @param pred node's predecessor holding status * @param node the node * @return {@code true} if thread should block */ // 刚刚说过,会到这里就是没有抢到锁呗,这个方法说的是:"当前线程没有抢到锁,是否需要挂起当前线程?" // 第一个参数是前驱节点,第二个参数才是代表当前线程的节点 privatestaticbooleanshouldParkAfterFailedAcquire(Node pred, Node node) { intws= pred.waitStatus; // 前驱节点的 waitStatus == -1 ,说明前驱节点状态正常,当前线程需要挂起,直接可以返回true if (ws == Node.SIGNAL) /* * This node has already set status asking a release * to signal it, so it can safely park. */ returntrue;
// 前驱节点 waitStatus大于0 ,之前说过,大于0 说明前驱节点取消了排队。 // 这里需要知道这点:进入阻塞队列排队的线程会被挂起,而唤醒的操作是由前驱节点完成的。 // 所以下面这块代码说的是将当前节点的prev指向waitStatus<=0的节点, // 简单说,就是为了找个好爹,因为你还得依赖它来唤醒呢,如果前驱节点取消了排队, // 找前驱节点的前驱节点做爹,往前遍历总能找到一个好爹的 if (ws > 0) { /* * Predecessor was cancelled. Skip over predecessors and * indicate retry. */ do { node.prev = pred = pred.prev; } while (pred.waitStatus > 0); pred.next = node; } else { /* * waitStatus must be 0 or PROPAGATE. Indicate that we * need a signal, but don't park yet. Caller will need to * retry to make sure it cannot acquire before parking. */ // 仔细想想,如果进入到这个分支意味着什么 // 前驱节点的waitStatus不等于-1和1,那也就是只可能是0,-2,-3 // 在我们前面的源码中,都没有看到有设置waitStatus的,所以每个新的node入队时,waitStatu都是0 // 正常情况下,前驱节点是之前的 tail,那么它的 waitStatus 应该是 0 // 用CAS将前驱节点的waitStatus设置为Node.SIGNAL(也就是-1) compareAndSetWaitStatus(pred, ws, Node.SIGNAL); } // 这个方法返回 false,那么会再走一次 for 循序, // 然后再次进来此方法,此时会从第一个分支返回 true returnfalse; }
/** * Wakes up node's successor, if one exists. * * @param node the node */ // 唤醒后继节点 // 从上面调用处知道,参数node是head头结点 privatevoidunparkSuccessor(Node node) { /* * If status is negative (i.e., possibly needing signal) try * to clear in anticipation of signalling. It is OK if this * fails or if status is changed by waiting thread. */ intws= node.waitStatus; // 如果head节点当前waitStatus<0, 将其修改为0 if (ws < 0) compareAndSetWaitStatus(node, ws, 0); /* * Thread to unpark is held in successor, which is normally * just the next node. But if cancelled or apparently null, * traverse backwards from tail to find the actual * non-cancelled successor. */ // 下面的代码就是唤醒后继节点,但是有可能后继节点取消了等待(waitStatus==1) // 从队尾往前找,找到waitStatus<=0的所有节点中排在最前面的 Nodes= node.next; if (s == null || s.waitStatus > 0) { s = null; // 从后往前找,仔细看代码,不必担心中间有节点取消(waitStatus==1)的情况 for (Nodet= tail; t != null && t != node; t = t.prev) if (t.waitStatus <= 0) s = t; } if (s != null) // 唤醒线程 LockSupport.unpark(s.thread); }
锁状态。我们要知道锁是不是被别的线程占有了,这个就是 state 的作用,它为 0 的时候代表没有线程占有锁,可以去争抢这个锁,用 CAS 将 state 设为 1,如果 CAS 成功,说明抢到了锁,这样其他线程就抢不到了,如果锁重入的话,state进行 +1 就可以,解锁就是减 1,直到 state 又变为 0,代表释放锁,所以 lock() 和 unlock() 必须要配对啊。然后唤醒等待队列中的第一个线程,让其来占有锁。